ブログ
地震計の物理学2-道化師のダンス-

| 前へ 地震計の物理学1-前口上- | 本項 | 次へ 地震計の物理学3-躍動する舞台- |
机の上で揺らしてみる
揺れを測るにはどうしたら良いか。例えばブランコの揺れを測るにはどうするか。難しく考える必要はなくて、どこかに基準点を用意して三角測量で位置を求めてあげれば良い。とは言えモタモタ分度器を当てていたのではブランコの速さに追いつけない。横からビデオ撮影して後からゆっくり計算することにしよう。固定された基準点さえあればあとは楽勝である。
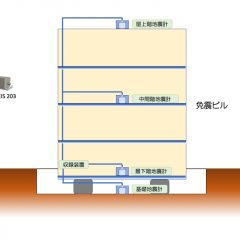
ところが地震計で測りたいものは大抵地面の揺れだ。それは土地だったり床だったり橋だったりもするが、いずれにせよ揺れているものの上に乗って測ることになる。基準点を取ろうにも周りの物も皆揺れている。
それでは二進も三進もいかないので、取り敢えず揺れていない机の上で何か揺らすことを考えてみよう。
この章から読み始めた人は地震計の物理学1を流し読みしてきてほしい。メーカーがしっかり技術的な解説をしていると思って読むと求めているものとは違う可能性がある。
単振動
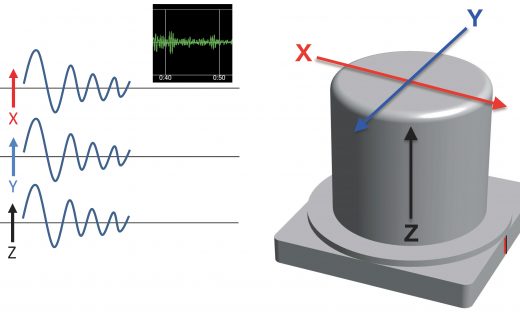
地震計というものは振動を測る機械である。振動と言えばみんな大好きバネの登場だ。シンプルなバネ運動なら計算も非常に簡単である。そして嬉しいことに一部の特殊な例を除いて、地震計は基本的にバネによる振動をコントロールすることで振動を測っている。よく出来た都合のいい話だが、偉大な先人が試行錯誤の上でよく出来た都合の良い話になるように作り上げて来たのである。その歴史は国立科学博物館の地震計の展示や京都大学阿武山観測所を見学しに行ってほしい。さて、バネに錘をぶら下げて揺らしてやることにしよう。と言ってもぶんぶん振り回したんじゃ考えるのは大変だ。何か考え始める時は出来るだけシンプルな方がいい。錘の動きは1自由度に固定し、なんなら重力も無視する。そこから少しずつ難しくしていこう。と言ってもぶんぶん振り回す運動まで取り扱う必要はない。地震計は普通、1軸のセンサーを3方向に向けて3つつけるので一次元の運動だけ考えればいい。助かった。
さて、錘の運動を考えるときに必要なのは運動方程式だ。質量mの質点がバネ定数kのバネに繋がれた時の運動方程式を考える。バネはその伸びに比例してかかる力が大きくなるので
\begin{aligned} m\frac{d^2x}{dt^2}=-kx \end{aligned}
と書ける。さらっと書いたが力の大きさが質量と加速度の積の形でかけるというのは大丈夫だろうか?左辺が重りにかかる力そのものを、右辺がその力の形を表している。物理学ではおなじみのニュートンの運動方程式である。-がついているのは移動した向きと逆向きに力が働くことを表している。バネなんだから引っ張ると戻ろうとするのだ。式を少し変形して
\begin{aligned} \frac{d^2x}{dt^2}=-\frac{k}{m}x \end{aligned}
としておこう。この2階の微分方程式を満たすxを求めるのが今の目的である。ややこしいのかわかりやすいのか2回微分すること(したこと)を2階微分というのだが、回数の話をしているわけではなく、関数の段階みたいな認識だろうか。状態を表すorderを日本語訳する時に階になってたまたま回と音が被ってしまったようだ。話がそれたが、ここで仮にx=e^{\lambda t}として2階微分すると
\begin{aligned} \frac{dx}{dt}&=\lambda e^{\lambda t}\\ &=\lambda x\\ \frac{d^2x}{dt^2}&=\lambda^2e^{\lambda t}\\ &=\lambda^2x \end{aligned}
となる事から微分方程式に代入すると
\begin{aligned} \lambda^2x=-\frac{k}{m}x \end{aligned}
より
\begin{aligned} &\lambda^2=-\frac{k}{m}\\ \therefore\;&\lambda=±i\sqrt{\frac{k}{m}} \end{aligned}
ここでiは虚数単位だ。
二乗すると-1になる不思議な数のことを虚数単位という。iがかかっている数を虚数、それ以外を実数と言い、実数と虚数の足し算を複素数という。人間の感覚だと数えられない不思議な数なのだが、数学の世界にとどまらず物理、工学の世界でも頻出する。実験しても人の目に映るのは実数部分の実部だけで虚部は見えかったりもするが、現象として確かにそこに存在している。ホーキング先生によれば「虚時間の宇宙」というよくわからないものが存在するらしい。筆者の積読の一つである。調べてみるとどうやら虚数は高校の数IIIで習うようで、数IIIだとみたことも聞いたこともない人も多いだろうということで少し掘り下げた。筆者と虚数の出会いは小学校高学年の頃に読んだ「数の悪魔」で、慣れ親しんでいたので少し驚いた。小学生から大人まで数学を楽しめる名著なのでぜひ読んでみてほしい。計算していたら虚数が出てきてしまったが気にせず進めよう。
実はx=a\cos{t}+b\sin{t}とすれば虚数は出てこないのだけれど、どうせ後々使うので慣れて欲しい。
さて、xを仮定してみたら都合良く良さそうな形になってくれたので2種類の解を得られた。
\left\{ \begin{array}{ll} x_1=e^{i\omega t}\\ x_2=e^{-i\omega t} \end{array} \right. \Bigl(\:{\omega = \sqrt{\frac{k}{m}}}\quad\Bigr)
x_1/x_2を計算してみると
\begin{aligned} \frac{x_1}{x_2}=e^{2i\omega t} \end{aligned}
となり定数でないことからx_1とx_2は比例の関係にないことがわかる。この時、x_1とx_2は1次独立であると言う。
2階の微分方程式の一般解は1次独立な2つの解の一次結合
\begin{aligned} x(t)&=c_1x_1+c_2x_2\\ &=c_1e^{i\omega t}+c_2e^{-i\omega t} \end{aligned}
で与えられる。ここでc_1,c_2は同時には0にならない定数である。2つの1次独立な解の一次結合が一般解になることは、平面上の任意の位置を示すのに2つの独立なベクトルを必要とすることに似ている。大学で数学をしっかり勉強して来た方なら似ているどころの話ではなくベクトルそのものである事を知っているかも知れない。筆者は今回勉強し直すまで完全に忘却の彼方であった。不勉強だったわけではなく忘却の彼方であったことにさせてください。
さて、一般解は得られたがこのままではどんな運動をするのか分かりにくいので初期条件としてt=0のときx=x_0,x'=v_0を与える。
\begin{aligned} x(0)&=c_1e^{i\omega・0}+c_2e^{-i\omega・0}\\ &=c_1+c_2\\ &=x_0 \end{aligned}
また、
\begin{aligned} x'(t)&=ic_1\omega e^{i\omega t}-ic_2\omega e^{-i\omega t}\\ x'(0)&=i\omega(c_1-c_2)\\ &=v_0 \end{aligned}
なので
\left\{ \begin{array}{ll} c_1+c_2=x_0\\ c_1-c_2=-i\frac{v_0}{\omega}\qquad(\because\frac{1}{i}=\frac{i}{i*i}=\frac{i}{-1}=-i) \end{array} \right.
より
\left\{ \begin{array}{ll} c_1=\frac{1}{2}(x_0-i\frac{v_0}{\omega})\\ \\ c_2=\frac{1}{2}(x_0+i\frac{v_0}{\omega}) \end{array} \right.
となる。これをx(t)に代入しオイラーの公式e^{it}=\cos{t}+i\sin{t}を使って計算を進めると
\begin{aligned} x(t)&=\frac{1}{2}(x_0-i\frac{v_0}{\omega})e^{i\omega t}+\frac{1}{2}(x_0+i\frac{v_0}{\omega})e^{-i\omega t}\\ &=\frac{x_0}{2}(e^{i\omega t}+e^{-i\omega t})-i\frac{v_0}{2\omega}(e^{i\omega t}-e^{-i\omega t})\\ &=\frac{x_0}{2}(\cos{\omega t}+i\sin{\omega t}+\cos{\omega t}-i\sin{\omega t})\\ &\quad-i\frac{v_0}{2\omega}(\cos{\omega t}+i\sin{\omega t}-\cos{\omega t}+i\sin{\omega t})\\ &=\frac{x_0}{2}(2\cos{\omega t})-i\frac{v_0}{2\omega}(i2\sin{\omega t})\\ &=x_0\cos{\omega t}+\frac{v_0}{\omega}\sin{\omega t}\\ &=A_0\sin{(\omega t+\delta)}\\ &\Bigl(A_0=\sqrt{x_0^2+\frac{v_0^2}{\omega^2}},\quad\tan{\delta}=\frac{x_0\omega}{v_0}\Bigr)\\ \end{aligned}
となる。当然、x_0,v_0,\omegaは実数なので、計算過程で絡んできた虚数単位iが消え実数部分だけ残ってくれた。実によく出来ている。複素数で表される質量や速度等も考えてあげることはできるのだろうが今回は関係ないので横に置いておこう。横に置いた勉強することリストがどんどん積み上がっていくが気にしない。知れば知るほどわからないことが増えていく。それが学問だ。
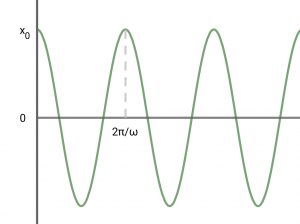
ここで特にv_0=0とする、つまり錘をx_0まで引っ張って静かに離すと、振幅x_0、周期\frac{2\pi}{\omega}で振動する単振動であることがわかる。当然\omegaはどの様なx_0であっても変わらない。v_0がかかっている第二項を見てもやはり周期\frac{2\pi}{\omega}で振動する\sin波であり、振幅や位相をずらす効果はあっても\omegaには全く影響しないことがわかる。解く過程でしれっと\omega = \sqrt{\frac{k}{m}}などとしたが、これがこのバネ運動固有の重要なパラメータだったのだ。この\omegaを固有角周波数と呼ぶ。また、\frac{2\pi}{\omega}を固有周期、\frac{\omega}{2\pi}を固有周波数と呼ぶ。周波数を振動数と呼ぶこともある。多くの構造物でそうである様に地震計にとっても最も大切なパラメータである。よく覚えておいてほしい。
https://www.desmos.com/calculator/otz9jzk0j2
減衰のある運動
シンプルな単振動では色々式をこねくり回してみたところ無事に普通に揺らしたら普通に揺れ続けるよねと言うことがわかってめでたしめでたしとなったわけだけれど、これでいいかと言えばそうは問屋が卸さない。問屋がおろしてくれなければ地震計を作れないし売ることもできない。困った。違う、そうじゃない。実際には空気や油や電磁力によって速度に比例する抵抗力が働き、エネルギーが熱となって拡散しそのうち止まってしまう。エントロピーは増大するのだ。エントロピー、使ってみたい物理用語top10(筆者調べ、サンプル数=1)に名を連ねるかっこいい用語である。つい言って見たくなって言い出してみたものの、学生時代熱統計力学は苦手だった記憶がある。地震を扱う上で統計力学は避けて通れないような気もするが、今はそっとしておこう。
さて、速度に比例する反力を運動方程式に追加してあげよう。速度は\frac{dx}{dt}と表せるので定数\nu(\geqq0)を用いて
\frac{d^2x}{dt^2}=-\nu\frac{dx}{dt}-\omega^2 x
と、書けるが左右に微分項が分かれていて扱いにくいのでいっそ左辺にまとめてしまう。
\frac{d^2x}{dt^2}+\nu\frac{dx}{dt}+\omega^2 x=0
こうやって書くと、力のあり様を示していた方程式がmaという力が錘に加わる他の力と釣り合って0になっているとみることができる(もっとも、この運動方程式はmで割って加速度の式になっているが)。この時maを慣性力と呼び、運動方程式を力の釣り合いの式と見なすことをD’Alembertの原理と呼ぶ。またカッコイイ物理用語を使ってしまった。10じゃきかなくなっていきそうだが沢山あることは良いことだ。ちゃんと使える様に勉強すればなお良い。ダランベール先生に感謝しつつ先へ進もう。
ここでまたx(t)=e^{\lambda t}を代入して見よう。
\lambda^2 x+\nu\lambda x+\omega^2 x=0\\ (\lambda^2+\nu\lambda+\omega^2)x=0\\ \therefore\lambda^2+\nu\lambda+\omega^2=0
これを特性方程式と呼ぶ。見たまま\lambdaの2次方程式なので解の公式で一発でわかる。しかし筆者は自分の記憶力に自信がなくいつも導出して確かめていた。念のため導出しておこう。
\lambda^2+\nu\lambda+\omega^2=0\\ \Leftrightarrow(\lambda+\frac{\nu}{2})^2-\frac{\nu^2}{4}=-\omega^2\\ \Leftrightarrow(\lambda+\frac{\nu}{2})^2=\frac{\nu^2-4\omega^2}{4}\\ \Leftrightarrow\lambda+\frac{\nu}{2}=\frac{±\sqrt{\nu^2-4\omega^2}}{2}\\ \therefore\lambda=\frac{-\nu±\sqrt{\nu^2-4\omega^2}}{2}
よし、無事に導出できた。初めて二次方程式の解の導出に出会ったときは無理やり(x+\frac{b}{2a})^2を作り出す乱暴さと、それにも関わらずあらゆる二次方程式に適用できる万能さに感動した記憶がある。感動したなら覚えておけという話で耳が痛いのだが、感動したのはその導出で、そっちはちゃんと覚えていたと言い訳させてください。公式は覚えていないと使えないわけだが、その導出や証明をちゃんと理解しておかなければ正しく使えないのだ。基本的なことは大事なのである。
さて、ここで大事になるのはお馴染み判別式、平方根内の\nu^2-4\omega^2だ。こいつが正になるか負になるか、はたまた0になるかで結果が全く変わってくる。負になると虚数が出てくるわけだが、そう言えば習った当時はそれを解なしとして扱っていた。虚数を習う前なので当たり前なのだが、もちろん今回はそうはせず複素数解として扱う。ゆっくり順番にみていこう。
減衰振動
\nu^2-4\omega^2<0のとき\sqrt{\nu^2-4\omega^2}は虚数になるので\lambdaは2つの複素数解となる。得られる2つの解は1次独立なので\Omega=\sqrt{\omega^2-\frac{\nu^2}{4}}として一般解は
\begin{aligned} x&=c_1e^{-\frac{\nu}{2}t+i\Omega t}+c_2e^{-\frac{\nu}{2}t-i\Omega t}\\ &=e^{-\frac{\nu}{2}t}(c_1e^{+i\Omega t}+ c_2e^{-i\Omega t})\\ &=e^{-\frac{\nu}{2}t}\bigl\{c_1(\cos{\Omega t}+i\sin{\Omega t})+ c_2(\cos{\Omega t}-i\sin{\Omega t})\bigr\}\\ &=e^{-\frac{\nu}{2}t}(a\cos{\Omega t}+b\sin{\Omega t})\\ &\bigl(\:a=c_1+c_2,\:b=i(c_1-c_2)\:\bigr) \end{aligned}
となる。一般解を得られたので初期条件を与えよう。単振動の時と同じくx(0)=x_0,x'(0)=v_0とする。
\begin{aligned} x(0)&=e^{-\frac{\nu}{2}・0}\bigl(a\cos{\Omega ・0}+b\sin{\Omega ・0})\\ &=a\\ &=x_0\\ \\ x'(t)&=-\frac{\nu}{2}e^{-\frac{\nu}{2}t}(a\cos{\Omega t}+b\sin{\Omega t})\\ &\qquad\qquad+e^{-\frac{\nu}{2}t}(-a\Omega\sin{\Omega t}+b\Omega\cos{\Omega t})\\ &=e^{-\frac{\nu}{2}t}\bigl\{(-\frac{\nu}{2}a+b\Omega)\cos{\Omega t}-(\frac{\nu}{2}+a\Omega)\sin{\Omega t}\bigr\}\\ \\ x'(0)&=e^{-\frac{\nu}{2}・0}\bigl\{(-\frac{\nu}{2}a+b\Omega)\cos{\Omega・0}-(\frac{\nu}{2}+a\Omega)\sin{\Omega・0}\bigr\}\\ &=-\frac{\nu}{2}a+b\Omega\\ &=v_0 \end{aligned}
よってa=x_0,b=\frac{2v_0+\nu x_0}{2\Omega}を得られた。これをxに入れて
\begin{aligned} x&=(x_0\cos{\Omega t}+\frac{2v_0+\nu x_0}{2\Omega}\sin{\Omega t})e^{-\frac{\nu}{2}t}\\ &=D(\frac{x_0}{d}\cos{\Omega t}+\frac{(2v_0+\nu x_0)/2\Omega}{d}\sin{\Omega t})e^{-\frac{\nu}{2}t}\\ &\qquad\bigl(\:D=\sqrt{x_0^2+(2v_0+\nu x_0)^2/4\Omega^2}\:\bigr)\\ &=D(\sin{\delta}\cos{\Omega t}+\cos{\delta}\sin{\Omega t})e^{-\frac{\nu}{2}t}\\ &\qquad\Bigl(\:\tan{\delta}=\frac{x_0}{(2v_0+\nu x_0)/2\Omega}\:\Bigr)\\ &=D\sin{(\Omega t+\delta)}e^{-\frac{\nu}{2}t} \end{aligned}
となる。単振動の時と同じ様にx_0まで引っ張って静かに離す、つまりv_0=0とすれば
\begin{aligned} x&=\sqrt{x_0^2+(\nu x_0)^2/4\Omega^2}\sin{(\Omega t+\delta)}e^{-\frac{\nu}{2}t}\\ &=x_0\sqrt{1+\nu^2/4\Omega^2}\sin{(\Omega t+\delta)}e^{-\frac{\nu}{2}t}\\ &=x_0d\sin{(\Omega t+\delta)}e^{-\frac{\nu}{2}t}\\ &\qquad\Bigl(\:d=\sqrt{1+\nu^2/4\Omega^2},\:\tan{\delta}=\frac{1}{\nu/2\Omega}\Bigr)\\ \end{aligned}
https://www.desmos.com/calculator/t6uxaddq8h
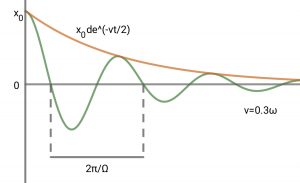
周期\frac{2\pi}{\Omega}で振動しつつ振幅がx_0de^{-\frac{\nu}{2}t}で減衰していく。当たり前だが、ここで\nu=0とすると\Omega=\omega, d=1, \delta=\frac{\pi}{2}となり単振動の式と一致する。また、\nu\to2\omegaと近づけていくと\Omega\to0, x_0e^{-\frac{\nu}{2}t}\to x_0e^{-\omega t}となり周期は限りなく伸び、振幅は急速に減衰する。では\nu^2-4\omega^2=0とした時どうなるか。早速計算して見よう。
臨界減衰
\nu^2-4\omega^2=0のとき\lambda=-\frac{\nu}{2}=-\omegaとなって解はx=e^{-\omega t}となるが、一般解を求めるためにはもう一つ独立な解を見つけ出してあげる必要がある。独立である必要性からもう一つの解をx=f(t)e^{-\omega t}と仮定する。
\begin{aligned} \frac{dx}{dt}&=f'e^{-\omega t}-\omega fe^{-\omega t}\\ &=(f'-\omega f)e^{-\omega t}\\ \\ \frac{d^2x}{dt^2}&=(f''-\omega f')e^{-\omega t}-\omega(f'-\omega f)e^{-\omega t}\\ &=(f''-2\omega f'+\omega^2f)e^{-\omega t}\\ \end{aligned}
より\frac{d^2x}{dt^2}+\nu\frac{dx}{dt}+\omega^2 x=0に代入すると
(f''-2\omega f'+\omega^2f)e^{-\omega t}+2\omega(f'-\omega f)e^{-\omega t}+\omega^2fe^{-\omega t}=0
fに注意して整理するとf''=0となるのでaを定数としてf=atを得る。したがって一般解は
x(t)=(at+b)e^{-\omega t}
となる。初期条件x(0)=x_0, x'(0)=v_0を与えると、
\begin{aligned} x(0)&=(a・0+b)e^{-\omega・0}\\ &=b\\ &=x_0\\ \\ x'(t)&=ae^{-\omega t}-\omega(at+b)e^{-\omega t}\\ &=(-\omega at +a-\omega b)e^{-\omega t}\\ x'(0)&=(-\omega a・0+a-\omega b)e^{-\omega・0}\\ &=a-\omega b\\ &=v_0 \end{aligned}
よりa=v_0+\omega x_0, b=x_0なので解は
x(t)=\{(v_0+\omega x_0) t+x_0\}e^{-\omega t}
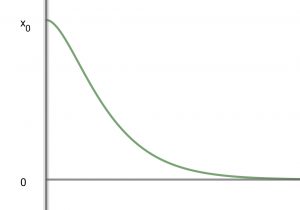
\nu=2\omegaとなると、ついに振動項がなくなり静かに減衰していく。この解を境に振動がなくなるので、これは臨界減衰と呼ばれる。下の図はv_0=0としたときのグラフである。
過減衰
最後に\nu^2-4\omega^2>0のときを考えよう。ある意味1番普通な実数解を最後に持ってきたのにはもちろんちゃんと理由がある。面倒なものを先に片付けてしまえと言った勤勉さでもなければ、面白そうだから変なものから取り組んだわけでもない。雑な議論をしつつも一応色々考えているのだ。振動解から段々と減衰するように議論したかったと言うのも一つの理由だが、1番の理由は弊社主力のFB型検出器が極めて強い制動をかける、つまり\nuがやたらと大きい機械だからだ。大切なものだから印象の残りやすい最後に待って来たのだ。
さて、やっていこう。と言っても今までとやることは変わらない。\gamma=\sqrt{\frac{\nu^2}{4}-\omega^2}として一般解はa,bを定数として
\begin{aligned} x(t)&=ae^{-\frac{\nu}{2}t+\gamma t}+be^{-\frac{\nu}{2}t-\gamma t}\\ &=(ae^{\gamma t}+be^{-\gamma t})e^{-\frac{\nu}{2}t} \end{aligned}
となる。お決まりの初期条件x(0)=x_0, x'(0)=v_0を与える。
\begin{aligned} x(0)&=(ae^{\gamma・0}+be^{-\gamma・0})e^{-\frac{\nu}{2}・0}\\ &=a+b\\ &=x_0\\ \\ x'(t)&=\gamma(ae^{\gamma t}-be^{-\gamma t})e^{-\frac{\nu}{2} t} )\\ &\qquad\qquad-\frac{\nu}{2}(ae^{\gamma t}+be^{-\gamma t})e^{-\frac{\nu}{2}t}\\ &=\Bigl\{(\gamma-\frac{\nu}{2})ae^{\gamma t}-(\gamma+\frac{\nu}{2})be^{-\gamma t}\Bigr\}e^{-\frac{\nu}{2}t}\\ x'(0)&=\Bigl\{(\gamma-\frac{\nu}{2})ae^{\gamma・0}-(\gamma+\frac{\nu}{2})be^{-\gamma・0}\Bigr\} e^{-\frac{\nu}{2}・0}\\ &=(\gamma-\frac{\nu}{2})a-(\gamma+\frac{\nu}{2})b\\ &=v_0 \end{aligned}
となる。ちょっとややこしいが難しくはないので解いていこう。a+b=x_0の両辺に\gamma+\frac{\nu}{2}をかけて(\gamma-\frac{\nu}{2})a-(\gamma+\frac{\nu}{2})b=v_0を足すとbが消えて
\begin{aligned} &(\gamma+\frac{\nu}{2}+\gamma-\frac{\nu}{2})a=(\gamma+\frac{\nu}{2})x_0+v_0\\ \Leftrightarrow&2\gamma a=(\gamma+\frac{\nu}{2})x_0+v_0\\ \Leftrightarrow&a=(1+\frac{\nu}{2\gamma})\frac{x_0}{2}+ \frac{v_0}{2\gamma}\\ \end{aligned}
また、
\begin{aligned} b&=x_0-a\\ &=x_0-(1+\frac{\nu}{2\gamma})\frac{x_0}{2}-\frac{v_0}{2\gamma}\\ &=(2-1-\frac{\nu}{2\gamma})\frac{x_0}{2}-\frac{v_0}{2\gamma}\\ &=(1-\frac{\nu}{2\gamma})\frac{x_0}{2}-\frac{v_0}{2\gamma}\\ \end{aligned}
よってxは
x(t)=\Bigl[\bigl\{(1+\frac{\nu}{2\gamma})\frac{x_0}{2}+\frac{v_0}{2\gamma}\bigr\}e^{\gamma t}+\big\{(1-\frac{\nu}{2\gamma})\frac{x_0}{2}-\frac{v_0}{2\gamma}\bigr\}e^{-\gamma t}\Bigr]e^{-\frac{\nu}{2}t}\\
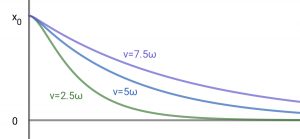
となり、時間経過とともにxが減少していく。これは過減衰と呼ばれる。\nuが大きくなるにつれて減衰が急速に進んだ\nu^2-4\omega^2<0からうってかわって\nu^2-4\omega^2=0を境に減衰が遅くなっていく。下の図はv_0=0としたときのグラフである。\nuが大きくなるほど減衰が遅くなっている。
考えて見れば当たり前だが、これは速度に比例する抵抗力が大きくなり、錘の動きが鈍くなったためと解釈できる。実はこの現象はすごく身近なところで日頃から体験している。玄関のドアなど重い扉についているドアクローザーだ。ドアは過減衰で閉じているのだ。ただし気をつけて欲しいのはドアが閉まった位置が原点ではないと言うことだ。それだと永遠に閉まらない。どれだけ時間が経っても限りなく閉まっているがまだ少し空いている状態になってしまう。閉まりそうで閉まらない少し開いてるドアである。この問題はバネを効かせて原点をわずかに開く方と反対側に寄せてあげれば解決する。実際にはそんなことをしなくても摩擦等で減衰し、動摩擦とバネが釣り合った適当なところで判別できないほど僅かに開いた所で止まるし、ドアには他にもいろんな構造物が付いているのでこんな簡単なモデルで語れるわけでもない。考え始めるといろいろ考えることがあってドアの物理学も面白そうである。ちゃんと勉強すれば立て付けの悪いドアを鮮やかに直し憧憬の目を一身に集めることも出来るだろう。たぶん。
あまり身近ではないが減衰振動するドアも見たことがあるだろう。西部劇などでガンマンがバーン!と開ける両開きのスイングドアと呼ばれる扉だ。一度でいいからあんな風にカッコよく登場してみたいものだ。その際は是非後ろで減衰振動していくドアにご注目いただきたい。
ところで、記事には載せなかったが臨界減衰や過減衰のアニメーションも作ってある。このアニメーションはグラフ計算サイトDesmosを使って作っているのでリンクをクリックしていただいて開いたページの関数で”Y(x)=”のfやgをhやkに書き換えていただければ臨界減衰、過減衰のアニメーションを見ることができる。また、上部に並んでいるパラメータをいじる事でいろんな挙動を見ることができるので是非遊んでみてほしい。
次は何を揺らそうか
さて、机の上で揺らす実験も一通り終わった。速度に比例する以外の抵抗力ももちろん働くのだけれど、ややこしい上にどうやら十分無視できる程度に小さいようなのでここでは棚上げにしておこう。もちろん実際にはそんなに単純ではなく、色々と工夫を凝らして地震計を設計しているのだが、難しいことは技術部の設計チームに任せることにする。次はいよいよ地震を起こして見よう。と言ってもそんなに都合良く地震は起きてくれない。都合良く起きてくれれば地震の研究も捗るだろうし、上手くいけば被災地の被害を減らせるかも知れないが、自然は人間の都合なんぞ知ったことではないのだ。あちらこちらにさまざまなセンサーを設置しご機嫌伺いしつつ、人類の叡智を結集し防災に努めるしかない。そんな研究や防災の一端を担い関われることを誇らしく思う。今後とも企業活動を通して僅かながらも貢献して行きたいと言うのは全社共通の想いだろう。
話がそれたが、地震を起こせないならどうするか?簡単である。錘の代わりに机を揺らせばいいのだ。
| 前へ 地震計の物理学1-前口上- | 本項 | 次へ 地震計の物理学3-躍動する舞台- |